Boris Landoni,
open-electronics.org
Since when white light emitting high brightness LED are available, the handover from traditional lighting bulbs to the solid-state lighting has become irreversible: LEDs have an efficiency (expressed in lumens/watt) higher than that of almost all the traditional lamps (except, at the moment, the large sodium vapor lamps used for street lighting, unusable in closed environments for the high power required and the chromatic aberration they produce) at a cost that is today less prohibitive than it was a few year ago. They are indeed very sturdy and have a very acceptable ratio of luminous flux and size.
In common with the traditional lamps, at least with fluorescent and neon, white LEDs have the characteristic to be produced to emit, depending on the model, a shade of white that ranges from warm (3,000 K) to cold (over 6,000 K). For this reason, when you want to create a lighting solution with light emitting diodes, you must be careful about what you purchase, if you just take the first lamp you can end up having a lighting that is not exactly what you want.
Another problem arises if you want to achieve lighting that can change the shade of the white according to the taste or mood of the moment, or even just to suit the needs of the guests; in this case you need a system which allows to vary the shade of the light emitted. Each LED, however, is made to give a certain color temperature and cannot be changed. Anyway there is a solution: use diodes both in warm and cold white, mixing the light in varying proportions.
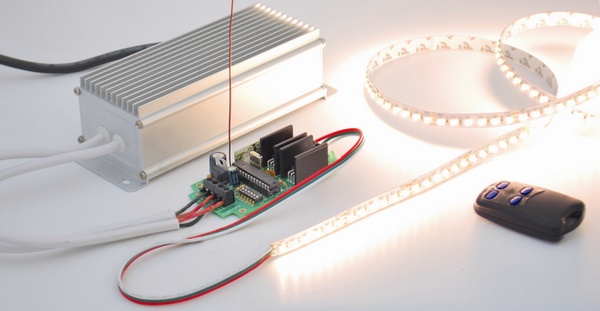
This is what the system described in this article does: basically a controller for two groups of white LEDs or for strips consisting of warm and cold white LEDs, driven separately (we tried with this solution) in PWM mode, so to vary the individual luminous flux of the two components and obtain a light that is a mixture of warm and cold white, with the chosen shade (Figure 1).
 |
|
| Figure 1. | Programmable Controller for interactive LED strips. |
Schematic Diagram
The system consists of a control circuit for LED strips with remote control receiver, remotely controlled by a radio signal in the UHF band at 433.92 MHz using a standard TX; the transmitter is amplitude-modulated with four channels; with the buttons on the transmitter you can manage the channels individually: raise and lower the brightness of the different rows of LEDs with warm and cold light.
Since the transmitter is a standard commercial model based on the UMC UM3750 IC (an evolution of the classic MM53200 with 4.096 combinations with binary 12-bit encoding) we won’t describe it; we will focus, instead, on the receiver/controller of which we will publish and describe the circuit diagram in the next paragraphs.
Specifications
- Board Power: 12/24Vdc
- Strip Power: 12/24Vdc
- Current: 2A per channel
- RF Encoding: MM53200/HT12 with self-learning
- Resume state in the event of blackout
- Functions: Dimmer, On/Off
- Handling of two common anode strips (2 channels)
Receiver diagram
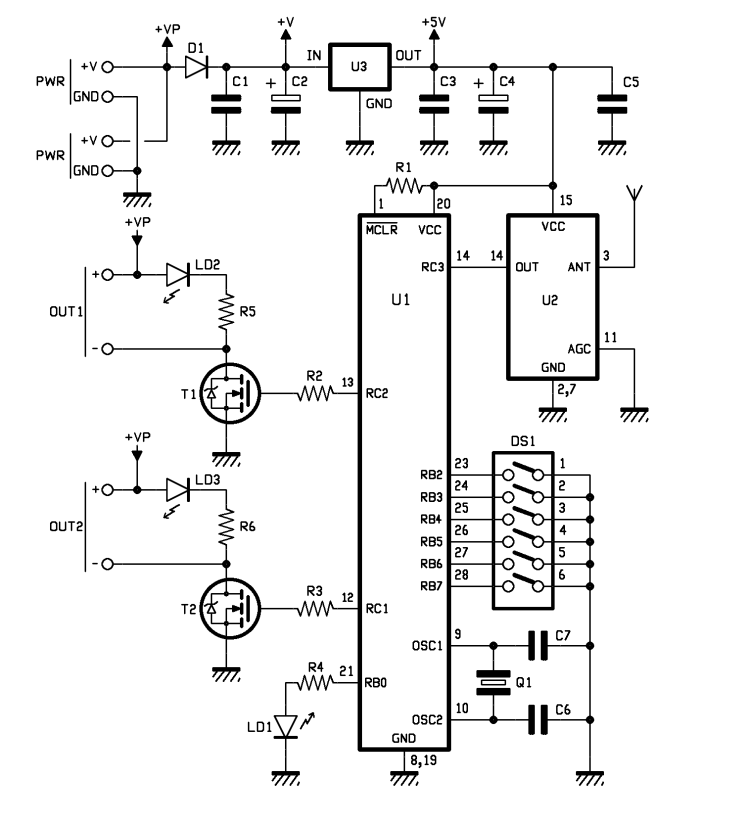
The controller is a combination of a hybrid Aurel AC-RX2 receiver tuned on 433.92 MHz and a Microchip PIC16F876A microcontroller programmed to act as the decoder of the code of the button pressed on the remote control (Figure 2). It generates two independent PWM signals and controls with them the gates of two enhancement-mode MOSFET with N-channel, which must drive the two LED strips or, more generally, groups of white LEDs. Since the transistors are configured in common-source, the circuit is suitable to drive common anode LED strips: we’ll in fact make available on the appropriate terminal the positive power supply and the MOSFET drain so that the circuit can drive the diodes bringing the cathodes to ground, with the times and manner prescribed by the PWM.
 |
|
| Figure 2. | Schematic Diagram of Programmable Controller for interactive LED strips. |
Let’s take a look at the circuit diagram: after the power-on, the Microchip microcontroller initializes its I/O and sets RC3 as input without pull-up dedicated to capture the data coming from the radio receiver U2, while. always as inputs, but with internal pull-up, sets RB2, RB3, RB4, RB5, RB6, RB7, which will be used to read the dip-switch DS1; instead RB0 is set as the output for the command of the signaling LED during procedures and RC1 and RC2 are set as the output of the PWM signal that drives the gate of the MOSFET T1 and T2.
Before proceeding, it is better specify that the output OUT1 (i.e. T1) controls the cold light LED (cold white) while OUT2 acts on the warm light ones (Warm white).
The wireless U2 receiver module is an AC-RX2 Aurel equipped with antenna signal amplifier (which gives a sensitivity of -106 dB),a superregenerative tuning stage tuned at 433.92 MHz using calibrated compensator at the factory and equipped with RF filter and amplitude demodulator; completes the module equipment, a squaring with a digital signal comparator (TTL level) coming from pin 14 and an LF amplifier of the output signal from the AM demodulator.
When pressing one of the buttons on the transmitter, the radiated RF signal reaches the receiving antenna of the module AC-RX2, which demodulates the data component and sends it to the pin 14; hence, the microcontroller takes the TTL pulse, places them in RAM and analyzes them with an appropriate firmware routine that, first of all, discerns among many signals picked up from the ether, the one that is compatible with the format of the UM3750 encoding. If so, checks if the code is one of those stored during the self-learning procedure and, if not, deletes the data from the RAM and gets ready for a new analysis.
We will later see how to match the transmitter to the circuit, by using self-learning procedure; for now it is enough to know that the firmware expects to learn all four command codes, which are increasing and decreasing the brightness of the cold light LED and increasing and decreasing the brightness of the warm light LEDs. This choice allows you to adapt the system to both encodings UM3750 (or MM53200/UM86409) and Holtek HT-12, as well as to manage the circuit by means of two different transmitters, i.e. without the constraint of being linked to a single transmitter.
Now let’s see what happens if the received signal contains one of the codes learned and retained in the working EEPROM from the PIC16F876: in this case, a routine starts to managing the signal generated by the PWM module inside the microcontroller. The signal is, after the start of the main program, characterized by a 50% duty cycle (unless you have activated the recovery function, that will be explained a few paragraphs below). If the received code is recognized and matches the button learned as UP of the OUT1 (we recommend the one in the upper left corner of the remote control – channel 2), the PWM intended to control OUT1 has one increase in the duty cycle at once, which is proportional to the pressure time; if it matches the button learned as DOWN of OUT1 (we suggest the lower left one) decreases the duty cycle of the PWM connected with channel 2. Again, if it matches the code learned as UP of OUT2 (button at the top right of the transmitter ) causes an increase of the duty cycle of the PWM that drives OUT2 and finally, if it is the code learned as DOWN of OUT2, causes a reduction of the duty cycle of the PWM of OUT2. It is understood that this is the operation in dimmer mode; if the received code lasts for less than a second (as will be explained later) you get the switching on or off of the corresponding light. The verification of the length of the code is done by the firmware.
Each output has a LED light which indicates its activity: for OUT1 is LD2 and for OUT2 is LD3; each diode has a current limiting resistor (R5 for LD2 and R6 for LD3).
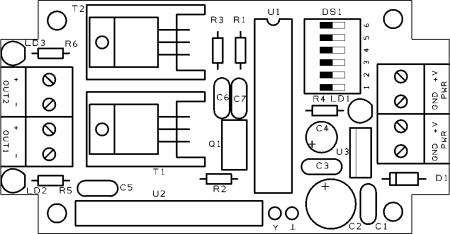
Example of component placement on PCB you see on Figure 3 and Figure 4.
 |
|
| Figure 3. | Programmable Controller for interactive LED strips: Component placement on PCB. |
 |
|
| Figure 4. | Programmable Controller for interactive LED strips: Component placement on PCB. |
| Table 1. BOM | |||||||||||||||||||||||||||||||||||||||||||||
|
Part 2 - Controller Configuration, Connections and Operation.
