Abstract
This article outlines the current methods used to enable true power-on (TPO) multiturn sensing capabilities and introduces a new simplified solution that is set to reshape both the industrial and automotive position sensing markets. The simplified system will enable designers, with or without magnetic system design experience, to replace bulky and expensive incumbent solutions.
Introduction
Position sensors and encoders are ubiquitous in automotive and industrial applications where it is vital that the position of the system is known at all times. However, incumbent position sensors and encoders can only provide a single turn or 360° TPO position information. Systems that require TPO position information over multiple rotations or wider measurement range typically incorporate a backup power supply to track and memorize the multiple rotations of the single turn sensor after an unexpected loss of power, or to track multiple turn movement during key-off or power-down. Alternatively, a gear reduction mechanism can be added to the system to reduce the multiple rotations to a single turn, and in combination with a single turn sensor, to find TPO multiturn position information. These solutions are expensive and bulky, and, in the case of the battery backup system, a regular maintenance contract is required.
Rotary and linear encoders are key devices used in applications where the system designer needs to ensure that the position of a mechanical system is always known for closed-loop control, even after a loss of power either as part of the normal operating cycle or accidental. The challenge for system designers is to ensure that the TPO position is available even after a loss of power. If the system state is lost, then a lengthy and often complex procedure is required to reset the system into a known state.
Incumbent solutions
Modern factories are becoming more dependent on robots and cobots to reduce cycle times, increase factory throughput, and improve efficiency. One of the major costs and inefficiencies associated with standard robots, cobots, and other automated assembly equipment is the resulting downtime required for rehoming and intializing power-up following a sudden loss of power while operating. This resulting downtime and productivity loss are both costly and inefficient. Although this issue can be solved with backup batteries, memory, and single turn sensors, these solutions have their limitations. Battery packs have a limited life span, and maintenance/service contracts are required to manage the battery replacement. In certain environments, where there is a risk of explosion, the maximum energy that can be stored in the battery pack is limited. The reduction in energy storage leads to a shorter maintenance cycle where the batteries must be replaced more frequently.
An alternative to battery backup is the use of Wiegand wire energy harvesting modules. These modules make use of a specially treated wire where the magnetic coercivity of the outer shell is much higher than the coercivity of the inner core. The different coercivities create voltage spikes at the device output when a magnetic field is rotated. The spikes can be used to power external circuitry and record the number of turns in a ferroelectric random-access memory (FRAM).
The magnetic multiturn memory that has been developed by Analog Devices requires no external power to record the number of rotations of an external magnetic field. This leads to a reduced system size and cost.
Multiturn sensor technology
At the core of the magnetic multiturn sensor is a spiral of giant magnetoresistance (GMR) material made up of multiple nanowires of GMR elements. The operating principle of the sensor is based on shape anisotropy and the generation of domain walls in a domain wall generator in the presence of an external magnetic field. As the external magnetic field rotates, the domain walls propagate through the narrow spiral tracks (nanowires) attached to the domain wall generator, as shown in Figure 1.
 |
|
| Figure 1. | The multiturn principle of the operation. |
As the domain walls move through the spiral leg structures, the state of each spiral leg element changes. Since the elements are fabricated from GMR material, the state of each one can be determined by measuring their resistance. The sensor relies only on the external magnetic field, and no additional backup power or energy harvesting technique is needed for the turn counting operation. When power is reapplied to the sensor, a reading of the turn count state is available with no further user actions or system resetting required.
A combined technology solution that simplifies system design
The top level block diagram of the ADMT4000, shown in Figure 2, combines the earlier described GMR multiturn sensor with a highly accurate AMR angle sensor and integrated signal conditioning IC to provide a solution that is capable of recording 46 turns or 16,560° of movement with a typical accuracy of ±0.25°. The integrated signal conditioning IC enables further system enhancements to support harmonic calibration, which can remove errors due to magnetic and mechanical tolerances from the application.
 |
|
| Figure 2. | The ADMT4000 multiturn sensor block diagram. |
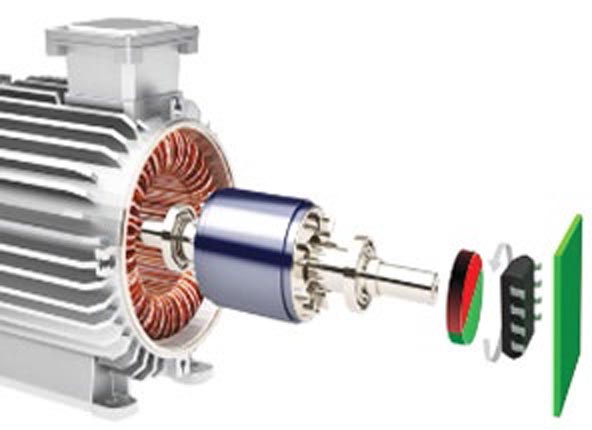
The ADMT4000 provides absolute 46 turn (0° to 16,560°) digital output via an SPI or SENT interface. The ADMT4000 is positioned opposite a dipole magnet mounted to the rotating shaft as depicted in Figure 3.
 |
|
| Figure 3. | The ADMT4000 typical application assembly. |
ADMT4000 capabilities are valuable in many industrial applications including robot and cobot arm joint position tracking in the event of a power outage or during power-down (see Figure 4). Other industrial applications include the absolute and TPO tracking of x-y tables in industrial automation, machine tools or medical equipment applications (shown in Figure 5). Other rotary to linear applications include, but are not limited to the turn counting of coils, drums, spools, reels, hoists, winches, and lifts (Figure 6) when powered or movement tracking when powered down or during power outages.
 |
|
| Figure 4. | The ADMT4000 in a robot/cobot application. |
 |
|
| Figure 5. | The ADMT4000 in a rotary to linear actuator application. |
 |
|
| Figure 6. | Wire draw encoder applications. |
Additionally, TPO position sensing provided by the ADMT4000 is of significant value for automotive applications including, but not limited to, transmission actuators (Figure 5), electrical power steering (EPS) including steer-by-wire (Figure 7), parking lock actuators, other general-purpose actuators, and seat belt retractors (Figure 8).
 |
|
| Figure 7. | A steer-by-wire application. |
The size, cost, and operating temperature range of the ADMT4000 enable its use in a wide range of applications including safety critical applications in the automotive and industrial space. Automotive safety critical applications are compliant to the ISO 26262 standard and a particular automotive safety integrity level (ASIL). The ADMT4000 will be supplied as either ASIL-QM or ASIL-B(D) to suit applications that do and don’t need the advanced ASIL or SIL functionality.
 |
|
| Figure 8. | A seat belt retractor application. |
Conclusion
The ADMT4000 and the first integrated TPO multiturn position sensor are set to significantly reduce system design complexity and effort, ultimately resulting in smaller, lighter, and lower cost solutions. The ease of use of the ADMT4000 will enable designers with and without magnetic design capability to add new and improved functionality to current applications and open the door to many new applications.